
現代の統計科学は、古くて新しいテーマの理論化にも挑戦し続ける。たとえば「運動」。動き回るモノたちをコントロールしている源は何なのか、運動の複雑な相互関係に対して、一種の定理が働くことはあるのだろうか。
このような発問は、哲学の初歩の香りを漂わす。デモクリトス、ヘラクレイトス、エムペドクレス…。古代ギリシャの学者たちの多くがモノの根源を問い、その活動のエネルギーや変転する姿の本質を解明しようとした。しかし、運動する物体に対する操縦力は全能の神ゼウスの意思によってしか、巧みには説明できなかった。
物質の運動の背後にあるコントロール原理。その科学的な説明は、統計科学にとって回避することのできない課題の一つだ。宮里義彦はこの古典的な難題に挑み続けている。
移動の速度を望ましい値にする制御手法

- 宮里 義彦
- 数理・推論研究系
計算推論グループ教授
宮里は数理・推論研究系の「計算推論グループ」に所属する。専門分野は「制御理論」。ホームページには、取り組んでいる研究テーマとして「適応制御に関する研究」、「非線形制御に関する研究」、「モデリングと制御の統合化設計に関する研究」などを掲げる。
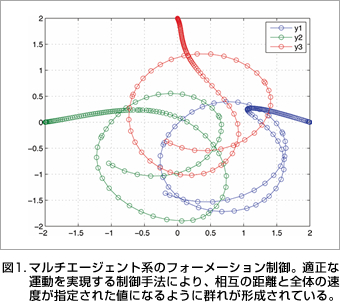
たとえば、魚は集団で移動する際、群れを形成して行動する。このようにフォーメーションを自動的に生成し、「適正な運動」を実現する制御手法の研究を行っている。複数のエージェント(特定の行為を行うもの:移動体)に対して、相互の距離が指定された値になるように群れを形成し、各エージェントの移動速度を望ましい値にする制御手法が、宮里の研究テーマとして意識される(図1)。
「エージェントごとにその特性が異なる場合に、特性変動を適切に推定して適応的に望ましい群れの運動(相互の適正な距離と適正な移動速度)を実現する制御手法の開発を行いました。さらにこれを発展させて、エージェント間の相互通信が特定の範囲に限られる場合でも、望ましい協調行動を実現する手法の開発研究も行っています」。
宮里はこれを「マルチエージェント系のフォーメーション制御」と呼ぶ。現実社会の問題としては、高速道路における自動車の群制御や、船舶、宇宙船など移動する物体の制御は如何にあるべきなのかを問うことになる。また、複数のロボットマニピュレータによる協調動作の実現のための基本原理を解明することにつながる。

科学者への道の原点は「鉄腕アトム」と「鉄人28号」
宮里は小学校の低学年の頃、ロボットが活躍する漫画アニメーションに心を躍らせた。特に手塚治虫の『鉄腕アトム』と横山光輝の『鉄人28号』。「私は最初のテレビ放送で育った世代です」と懐かしそうに言う。テレビを見ながら、自分で考えて行動する人工物の実現に興味を持った。そして、将来は科学者になりたいと思ったことが、今日の研究生活の原点にある。
鉄腕アトムも鉄人28号も、共に人間社会に役立つようにプログラムされた人工物。しかし、両者には大きな違いがあった。アトムは知能を持ち、自分で考えて行動する。これに対し、鉄人には自我がなく、リモコンで操作されて運動行動を実現する。これを学問分野にたとえるならば、人工頭脳工学か機械系工学の違いとも言えようか。「自分はどちらの路線を研究すべきか」と、宮里少年は深く悩み、「大学2年生になっても方向が決まらずに迷った」と思い返す。結局、自分の中の双方の可能性を大事にするかのように、「体系的な工学システムの理論の枠内で、適応・学習機能の実現を考える制御工学を学ぶことになりました」と振り返る。
鉄腕アトムがヒントになった制御工学は宮里の具体的な発想の原点であり続ける。「モノとモノの集合が関与する、すべての行動の原理に関する方法論を築きたいと思う」と夢を語る。その一歩、「弾性体の制御問題」では大きな成果を上げた。
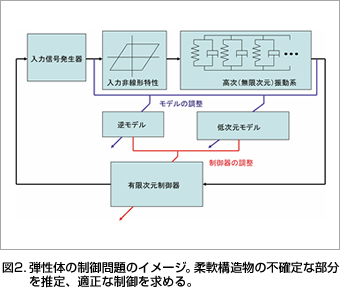
高層ビルや橋梁、人工衛星の太陽電池パネルなどの柔軟構造物は力が加わると変形して振動する。このような柔軟構造物(グニャグニャ変形するもの)に対して、その不確定な部分を推定しながら適正な制御を行うことが求められる。つまり、振動を抑制した状態下の「望ましい運動」の実現がテーマとなる。「柔軟物体は数学的には高次元の振動方程式(微分方程式)あるいは無限次元の偏微分方程式を用いて表すことができます。これらを駆使して、全体として適正な振動抑制と、望ましい運動を実現する制御手法を実現しました。さらに多くの機械において力を発生させる部分(入力信号発生器)に不感帯やバックラッシュが存在することにも着目し、振動抑制と望ましい運動が実現されるような制御手法を開発しました」と、宮里は自らの研究の成果を説明する(図2)。
セミアクティブサスペンションを用いた高速バスの制御
総研大の学生との共同研究では、高速道路の大型バスを想定して、状態観測器(観測される値から車両の内部状態を推定する機構)の設計を行った。サスペンションとタイヤ部をバネ・マス・ダンパ系(機械系のモデル化の方法)でモデル化し、周波数整形法(様々な振動数の揺れに対する応答を調整する方法)を併用したことがポイントだ。この観測器を利用した制御方法が、固定サスペンション方式よりも、車酔いに関係する振動の抑制に優れた効果をあらわすことになった。「簡単に言えば車の揺れが押さえられたということです」と宮里は軽く言うが、制御の統計科学が現実社会のやっかいな悩み事を解決するのに貢献した事例だ(写真1)。
リラックスできる趣味は自転車。「休日に、ぼーっとしながらペダルを漕ぐのが楽しいですね。研究のことは考えていませんね」と言うのだが、運動の本質に迫る哲学的問いが、いつも宮里と共にある。
(広報室)

![]()